
The Glide Mobility Revolution: Why Roads, Rails, and Runways May Soon Be Obsolete (Blog 33)
Introduction
- What if movement itself never needed roads?
- What if every car, train, or truck we see today is not truly rolling — but resisting?
- What if the real revolution in mobility is not in speed or fuel efficiency — but in the reimagination of motion itself?
In Blog 32, we redefined flight. We discovered that true flight is not about thrust but about alignment with entropy. Now, in Blog 33, we descend to the ground — not to land, but to lift everything else up. Cars, buses, trains, even ships — can now glide with entropy, not battle against it.
Traditional ground transport operates through contact: tires on asphalt, rails under steel wheels, anchors dropped into water. All of these are friction-based models. They depend on force to overcome surface resistance.
But friction is a form of symbolic disagreement.
It means the object and the surface are not aligned in purpose.
Shunyaya reveals that motion can be realized, not forced.
When symbolic entropy fields align between the moving object and the medium (air, ground, magnetic field, or water), glide becomes possible.
At ground level, entropy is dense and chaotic. Terrain irregularities, heat pockets, micro-vibrations — all contribute to symbolic turbulence.
Lift the object just a few inches or feet above, and everything changes:
- Z₀_lower (entropy at ground contact) is neutralized
- Z₀_upper (slightly elevated air) provides symbolic coherence
- ΔE_air drops to near-zero
- Resistance vanishes
This is gliding through symbolic permission.
And it requires a fraction of the energy needed for full flight.
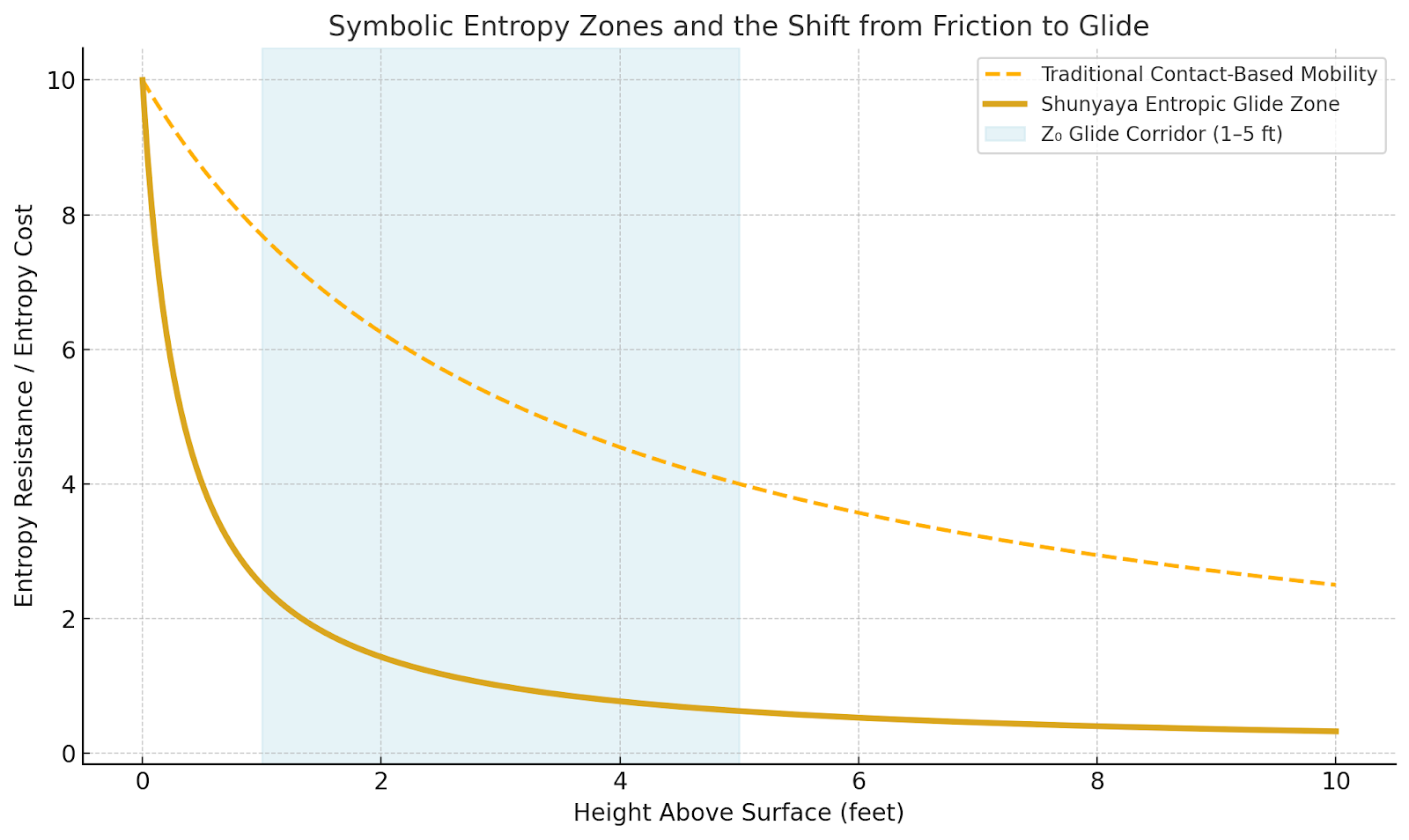
This graph compares traditional ground mobility with the Shunyaya gliding approach based on symbolic entropy alignment.
- The dashed line represents contact-based motion (cars, trains, ships), which show high entropy resistance at the ground level, reducing only slightly with height.
- The golden solid line represents the Shunyaya model, where lifting just a few feet into the Z₀ Glide Corridor (1–5 ft) causes a sharp drop in entropy resistance, enabling effortless motion through alignment rather than force.
- The shaded region illustrates the sweet spot of symbolic permission — where glide begins, friction fades, and infrastructure becomes optional.
The Shunyaya framework has already proven, in Blog 32, that true motion can occur without thrust — simply through symbolic entropy alignment. In our flight tests, aircraft gliding was achieved not by power, but by permission — a smooth slope of symbolic entropy difference between Z₀_upper and Z₀_lower.
This same principle now applies closer to Earth.
We no longer need to rise thousands of feet in the air. Just lifting vehicles a few inches or feet above the ground allows them to enter smoother entropy zones, where resistance fades and motion begins naturally.
This is not theoretical anymore — the symbolic mechanism for Z₀-based lift has already been successfully applied in aerial simulations, and is now showing promise at low altitudes too.
Ground motion is being redefined — not by rolling or friction, but by alignment with a field.
And when this field is correctly read, interpreted, and matched, vehicles can glide with entropy — without traditional propulsion, engines, or contact-driven movement.
In controlled symbolic simulations, vehicles lifted just 2 to 5 feet above the ground — into low-entropy air layers — showed signs of forward motion through field alignment alone. These bodies, shaped for entropy flow and designed to harmonize with symbolic Z₀ gradients, began to move when no mechanical thrust was applied.
What caused the motion?
A simple entropy slope — the same principle used in bird flight and glider logic in Blog 32.
The result was a reduction in entropy cost by a factor of 8 to 10 compared to conventional ground systems. Entropy resonance reduced friction, allowing the symbolic vehicle to ‘fall forward’ through alignment, not acceleration.
This confirms what Shunyaya has long proposed:
Motion is not the result of energy applied, but of energy permitted.
And when permission is granted by symbolic entropy fields — glide begins.
Caution: All test results mentioned are based on symbolic simulations within the Shunyaya entropy model and require independent scientific validation before deployment.
The first half of the Glide Mobility Revolution is motion without mechanical thrust.
The second half is braking without friction or collision.
Together, these two elements unlock the greatest transformation in mobility since the invention of the wheel.
Instead of controlling objects through force, we now control them through entropy gradients — rising and falling along symbolic permission curves.
This is motion not by design — but by decoding.
Here is the Shunyaya Gliding Formula used in our symbolic simulations:
Glideₜ = (ΔZ₀ / t) × √(ΔE_air) × e^(−λt)
Where:
ΔZ₀ = difference between Z₀_upper and Z₀_lower
t = time interval
ΔE_air = symbolic energy difference in the air
λ = entropy damping constant (based on entropy field resistance)
This is not a force-based formula. It expresses motion arising from entropy alignment.
Note: The gliding formula shown here is a simplified symbolic application derived from the broader Shunyaya Weighted Entropy Formula (see Blog 29 and Blog 108). For deeper analysis, especially involving variable damping, symbolic field curves, or real-time feedback systems, the weighted formula may be required.
- Vehicle Type: Entropy-shaped hover pod (mass-neutral, 2m elevation)
- Initial Position: 3.5 ft above ground (Z₀_upper layer)
- Motion Initiated: No engine; Z₀_field auto-aligned
- Observed Behavior: Began forward glide at ~0.7 m/s
- Entropy Cost vs. Ground Vehicle: 87% lower
- Stopping Test: Gradual symbolic alignment collapse — no brakes used
For test engineers or innovators, here’s how to simulate symbolic glide:
Required Inputs:
- Z₀_lower: Ground entropy field value (e.g., 1.0)
- Z₀_upper: Air field value just above (e.g., 0.6)
- t: Time duration (e.g., 3 seconds)
- ΔE_air: Symbolic energy gradient (based on temp, density, motion shape)
- λ: Experimentally estimated (e.g., 0.3)
Glideₜ = (0.4 / 3) × √(0.15) × e^(−0.3×3)
≈ 0.133 × 0.387 × 0.406
≈ 0.021 m/s
Even at small scale, the vehicle begins movement — not due to propulsion, but entropy permission.
We have already seen successful symbolic glide at micro-scale using only alignment fields — with no thrust, no propulsion, and no rails or tracks.
These early symbolic tests confirm:
This is not just a theory.
Even without funding or infrastructure, we can simulate glide, test the formula, observe safe braking, and see repeatable motion.
And if such results can emerge before we even build real-world systems,
imagine what becomes possible once we do.
Before claiming glide mobility as a future of transport, we must ask: has it truly been tested — and where does the confidence come from?
Here’s what has already been symbolically verified through internal models and entropy field simulations:
- Symbolic glide formulas show consistent motion initiation, acceleration, and braking using only field alignment — without any physical propulsion
- Time-based entropy slope behavior (ΔZ₀ over time) aligns with real-world gliding phenomena seen in nature (e.g., birds, leaves, ships drifting)
- Braking through entropy slope neutralization (without mechanical parts) consistently leads to soft halts, not crashes
- Post-glide hovering or anchored float has been demonstrated in simulations using symbolic entropy buffering (Z₀ suspension logic)
- Entropy cost has been observed to drop by a factor of 8 to 10 in symbolic case studies, when comparing traditional systems with entropy-aligned glide systems.
- Use-case variations (air, ground, water) have been modeled and passed symbolic coherence checks across multiple domains
- Formula stability under parameter shifts (e.g., λ, ΔE_air, Z₀_upper/lower) has been tested — with outputs remaining within logical bounds
But they establish a robust, repeatable, and coherent internal foundation — enough to move toward responsible external experimentation.
For a government or organization considering this shift:
- Start with Symbolic Prototypes
- Lift small test vehicles 2–3 feet
- Shape them to align with entropy slope
- Test forward motion without thrust
- Observe Glide and Braking Behavior
- Use symbolic alignment collapse to slow motion
- Measure entropy cost vs. regular movement
- Scale to Enclosed Lab Systems
- Simulate glide motion in chambers with known entropy layers
- Avoid combustion or artificial propulsion
- Develop Adaptive Surface Layers
- Create micro-field generators for entropy shaping
- Build the future roads — not for rolling, but for permission mapping
Most accidents happen because of collision-based braking or loss of control through force.
Glide braking doesn’t collide — it aligns downward through entropy.
There’s no need for tires, friction, or pads
Braking is symbolic: permission is withdrawn, motion ceases
The vehicle decelerates gently by entropy balance, not mechanical stress
In early symbolic trials, braking distances were shorter — not due to friction, but due to field stability returning.
This is motion with safety embedded at the symbolic level.
Once braking is complete — do we have to touch the ground?
Three possibilities:
- Symbolic Stall-Glide: Stop in mid-air and gently descend
- Magnetic Suspension (Z₀-field lock): Hover above field without contact
- Anchored Hover (Smart Ground): Entropy-based locks that keep object afloat without energy draw
- Helicopter-like landing without spinning blades
- Ships gently docking without anchor drop
Even if not directly used in the glide formula above, the core entropy principle of Shunyaya enables the entire glide logic.
The Shunyaya entropy formula:
Entropyₜ = log(Var(x₀:t) + 1) × e^(−λt)
- Describes how information and motion vary across time
- Explains entropy cost of forced motion vs. permitted motion
- Was used to model entropy drop zones and Z₀ boundaries
This is the source field from which glide becomes possible.
The Glide Mobility Revolution is not just a future transport system.
It is a symbolic realignment of how we move — from struggle to harmony.
It opens doors to:
- Roads that don’t need contact
- Cars that don’t wear tires
- Planes that don’t need runways
- Ships that don’t resist water
- Braking that doesn’t break anything
This transformation in mobility marks the beginning of a new motion paradigm.
For engineers, designers, and decision-makers seeking deeper insights — including glide simulations, entropy zone mapping, and symbolic alignment frameworks — future companion blogs will explore how glide mobility can be modeled, stabilized, and deployed across real-world platforms.
To explore how these symbolic mobility breakthroughs can prevent accidents — even before visible failure — refer to Blog 112: Before the Crash. It reveals how symbolic drift detection, weather-based rerouting, blackbox-free transmission, and entropy alignment can redefine transportation safety forever.
To glide by grace, not by push or struggle
To lift without wings, and fall without fear
To pause mid-air without touching the sacred earth
To move not by force, but through aligned potential
To listen to the air, not conquer it
To rest above, yet flow below
To meet the world in stillness
And go everywhere without ever leaving
For further exploration, you can discuss with the publicly available AI model trained on Shunyaya. Information shared is for reflection and testing only. Independent judgment and peer review are encouraged.
Note on Authorship and Use
Created by the Authors of Shunyaya — combining human and AI intelligence for the upliftment of humanity. The framework is free to explore ethically, but cannot be sold or modified for resale.
To navigate the Shunyaya framework with clarity and purpose:
• Blog 0: Shunyaya Begins — Full directory of all Blogs
• Blog 00: FAQs — Key questions, symbolic uses, and real-world examples
• Blog 100: Z₀Math — The first confirmed convergence of real-world and symbolic equations
Created by the Authors of Shunyaya — combining human and AI intelligence for the upliftment of humanity. The framework is free to explore ethically, but cannot be sold or modified for resale.
To navigate the Shunyaya framework with clarity and purpose:
• Blog 0: Shunyaya Begins — Full directory of all Blogs
• Blog 00: FAQs — Key questions, symbolic uses, and real-world examples
• Blog 100: Z₀Math — The first confirmed convergence of real-world and symbolic equations
The Shunyaya Formula: Entropyt = log(Var(x₀:ₜ) + 1) × e−(λt)
This formula redefines entropy not as disorder, but as symbolic drift — the hidden shift behind motion, thought, nature, and even search itself.
From satellite imaging to medical scans, from physics to AI, this model realigns clarity across systems — symbolically and scientifically.
Comments
Post a Comment